本文还有配套的精品资源,点击获取 
简介:STM32基于ARM Cortex-M内核,广泛应用于嵌入式系统中的无线通信场景。本资源提供一份经过实际测试、可稳定运行的STM32无线通信程序,涵盖Wi-Fi、蓝牙等模块的接口配置与数据传输流程,适用于学习和开发物联网、智能家居等应用。内容包括GPIO配置、SPI/UART/I2C通信初始化、无线模块参数设置、数据收发机制及错误处理,配合ALIENTEK MINISTM32实验教程,帮助开发者快速掌握STM32无线通信的完整实现过程。
在嵌入式物联网应用中,STM32作为主流的ARM Cortex-M系列微控制器,广泛应用于各类无线通信场景。本章将深入剖析基于STM32构建的无线通信系统的整体架构设计,涵盖硬件平台选型、无线模块集成方式、系统功能划分以及软硬件协同工作机制。重点介绍Wi-Fi与蓝牙(BLE)双模通信系统的分层结构,包括物理层、数据链路层、网络接口层和应用层的基本职责,并结合ALIENTEK MINISTM32开发板的实际布局,解析主控芯片与无线模块之间的连接关系。
// 示例:STM32通过UART与ESP8266模块通信的基础初始化调用
UART_HandleTypeDef huart1;
HAL_UART_Init(&huart1); // 初始化UART外设
HAL_UART_Transmit(&huart1, (uint8_t*)"AT
", 4, 100); // 发送AT指令测试模块响应
通过系统级视角建立对无线通信流程的整体认知,为后续具体技术实现打下坚实理论基础。
在STM32嵌入式系统中,通用输入输出(General Purpose Input/Output, GPIO)是连接微控制器与外部世界的最基本、最灵活的接口。无论是驱动LED指示灯、读取按键状态,还是作为通信协议(如SPI、I2C、UART)的信号线,亦或是触发中断唤醒系统,都离不开对GPIO的精确配置与高效控制。深入理解GPIO的工作机制不仅是硬件调试的基础,更是构建稳定无线通信系统的前提。本章节将从底层寄存器机制到高级HAL库封装,系统性地剖析STM32中GPIO的配置逻辑、工作模式选择、中断响应流程以及实际工程中的优化策略。
STM32的GPIO端口由多个可编程寄存器构成,支持多达八种不同的工作模式,每种模式对应特定的应用场景和电气特性。掌握这些模式的本质及其背后的寄存器操作原理,有助于开发者在资源受限或性能要求严苛的场合进行精细化控制。
2.1.1 STM32 GPIO的八种工作模式详解
STM32的每个GPIO引脚都可以通过配置相关寄存器设置为以下八种工作模式之一:
这些模式的选择直接影响引脚的行为特征。例如,在设计一个与Wi-Fi模块通信的GPIO控制线时,若该引脚用于复位(nRST),应优先选用 推挽输出模式 以确保能够可靠拉低并释放;而如果用于连接一个共享总线上的设备使能信号,则可能需要使用 开漏输出 配合外部上拉,避免总线冲突。
// 示例:手动设置PA5为推挽输出模式(50MHz)
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN; // 使能GPIOA时钟
GPIOA->CRL &= ~GPIO_CRL_MODE5; // 清除原有模式位
GPIOA->CRL |= GPIO_CRL_MODE5_1; // 设置最大速度为50MHz
GPIOA->CRL &= ~GPIO_CRL_CNF5; // 清除配置位
GPIOA->CRL |= GPIO_CRL_CNF5_0; // 设置为通用推挽输出模式
代码逻辑逐行解析:
– 第1行:通过设置RCC->APB2ENR寄存器中的IOPAEN位来开启GPIOA的时钟,否则无法访问其寄存器。
– 第2行:使用按位与操作清除CRL寄存器中关于Pin5的MODE字段(低两位),准备重新写入。
– 第3行:设置MODE5[1:0] = 11(即50MHz输出速度)。
– 第4行:清除CNF5字段(高两位),防止旧配置影响。
– 第5行:设置CNF5[1:0] = 01,表示通用推挽输出模式。
此段代码展示了直接操作寄存器的方式,虽然繁琐但效率极高,适用于启动阶段或实时性要求高的环境。
2.1.2 端口配置低/高寄存器(CRL/CRH)的作用与设置方法
STM32的每个GPIO端口包含两个关键配置寄存器: 端口配置低寄存器(CRL) 和 端口配置高寄存器(CRH) ,分别管理Pin0~Pin7和Pin8~Pin15。每个引脚占用4位(CNFx与MODEx),其中:
– MODE[x] :决定输出速度(输入时无效)
– CNF[x] :决定输入/输出类型及上下拉配置
graph TD
A[GPIO Pin X] --> B{是否为Pin0~7?}
B -- 是 --> C[CRL寄存器]
B -- 否 --> D[CRH寄存器]
C --> E[提取CNF和MODE位]
D --> E
E --> F[配置输入/输出行为]
F --> G[驱动硬件逻辑单元]
上述流程图清晰地表达了引脚配置路径:根据引脚编号定位对应的寄存器,提取4位配置信息,最终决定其电气行为。
以PA9为例,它属于高寄存器范围(Pin8~15),因此需操作 GPIOA->CRH 。假设将其配置为复用推挽输出(如USART1_TX),则应执行如下步骤:
// 配置PA9为复用推挽输出(USART1_TX)
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN; // 使能GPIOA时钟
uint32_t pinPos = 9;
__IO uint32_t *reg = &GPIOA->CRH; // PA9位于CRH
*reg &= ~(0xF << ((pinPos - 8) * 4)); // 清除原配置(4位一组)
*reg |= (0xB << ((pinPos - 8) * 4)); // CNF=11(复用推挽), MODE=01(10MHz)
参数说明:
–pinPos - 8:因CRH管理Pin8起始,偏移量需减去8。
–<< ((pinPos - 8)*4):每组4位,乘以4得到正确的位位置。
–0xB = 1011b:CNF[1:0]=11表示复用推挽,MODE[1:0]=01表示输出速度10MHz。
这种寄存器级操作提供了最大的灵活性,但也容易出错,建议仅在Bootloader或极简系统中使用。
2.1.3 输入/输出电平读写操作的底层原理
GPIO的状态读取与写入分别通过 IDR(Input Data Register) 和 ODR(Output Data Register) 实现。这两个寄存器均为只读(IDR)或可写(ODR)的32位寄存器,每位对应一个引脚。
例如,要读取PB0的输入状态:
uint8_t button_state = (GPIOB->IDR & GPIO_IDR_IDR0) ? 1 : 0;
而要设置PA5输出高电平:
GPIOA->BSRR = GPIO_BSRR_BS5; // 置位BS5
// 或者
GPIOA->ODR |= GPIO_ODR_ODR5;
更推荐使用 BSRR (Bit Set/Reset Register)进行原子操作:
// 原子置位与清零(避免竞争条件)
GPIOA->BSRR = GPIO_BSRR_BS5; // PA5 = High
GPIOA->BSRR = GPIO_BSRR_BR5; // PA5 = Low
优势分析:
–BSRR写入高位(BRy)自动清除对应ODR位,低位(BSy)设置对应位。
– 整个操作在一个周期内完成,不会被中断打断,适合多任务环境。
此外,STM32还提供 BRR (Bit Reset Register)专门用于清零,但不如 BSRR 统一方便。
随着嵌入式开发复杂度上升,直接操作寄存器的方式逐渐被标准化的HAL(Hardware Abstraction Layer)库所取代。HAL库不仅提升了代码可移植性,也简化了初始化流程。
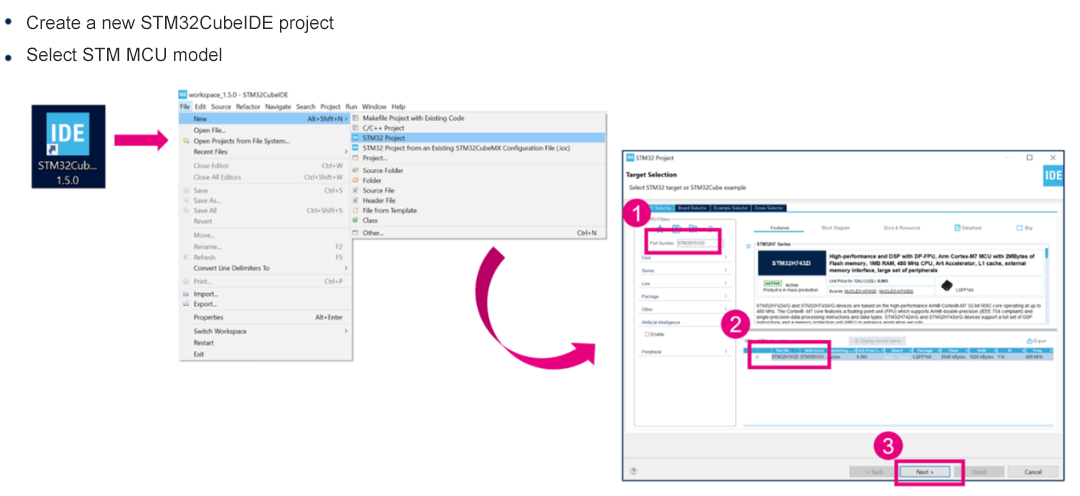
2.2.1 使用STM32CubeMX进行引脚可视化配置
STM32CubeMX是ST官方提供的图形化配置工具,支持引脚分配、时钟树设置、外设初始化生成等功能。通过拖拽即可完成GPIO配置。
操作步骤:
1. 打开STM32CubeMX,选择目标芯片(如STM32F103C8T6)。
2. 在“Pinout & Configuration”标签页中,点击某个引脚(如PC13)。
3. 在右侧面板选择“GPIO_Output”,Mode选“Push Pull”,Pull选“No pull”。
4. 软件自动生成初始化代码,并标记该引脚用途为“LD_USER”。
生成的 .ioc 项目文件可长期维护,极大提升团队协作效率。
2.2.2 生成代码分析:GPIO_InitTypeDef结构体配置逻辑
CubeMX生成的核心结构体为 GPIO_InitTypeDef ,定义如下:
GPIO_InitTypeDef gpio_init;
gpio_init.Pin = GPIO_PIN_13;
gpio_init.Mode = GPIO_MODE_OUTPUT_PP;
gpio_init.Pull = GPIO_NOPULL;
gpio_init.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &gpio_init);
参数说明:
–.Pin:指定作用引脚(支持OR组合多个引脚)。
–.Mode:工作模式枚举值,如GPIO_MODE_OUTPUT_PP表示推挽输出。
–.Pull:上下拉配置,GPIO_NOPULL表示不启用。
–.Speed:输出速率等级,不同系列略有差异。
HAL_GPIO_Init() 函数内部会根据所选端口自动计算应修改CRL或CRH,并屏蔽其他引脚的配置,保证安全性。
2.2.3 输出高低电平控制LED状态切换实战示例
结合HAL库实现LED闪烁:
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init(); // 自动生成的GPIO初始化
while (1) {
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); // LED亮
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); // LED灭
HAL_Delay(500);
}
}
也可使用更高效的 BSRR 方式:
// 替代方案:直接操作寄存器提升性能
while(1) {
GPIOC->BSRR = GPIO_BSRR_BS13;
HAL_Delay(500);
GPIOC->BSRR = GPIO_BSRR_BR13;
HAL_Delay(500);
}
性能对比:
–HAL_GPIO_WritePin包含函数调用开销,适合一般应用。
– 直接寄存器操作执行更快,适合高频翻转(如PWM模拟)。
外部中断(EXTI)允许GPIO引脚在电平变化时触发CPU中断,从而实现低功耗唤醒或实时响应。
2.3.1 外部中断线(EXTI)与GPIO映射关系
STM32规定每个GPIO引脚可通过AFIO(Alternate Function I/O)映射到特定的EXTI线上。例如:
– PA0 → EXTI0
– PB1 → EXTI1
– …
– PX15 → EXTI15
但同一时间只能有一个端口的某号引脚连接到对应EXTI线(如PA0和PB0不能同时作为EXTI0)。
__HAL_RCC_AFIO_CLK_ENABLE();
__HAL_AFIO_REMAP_SWJ_NOJTAG(); // 可选:释放PB3/PB4为普通GPIO
配置EXTI前必须使能AFIO时钟,并注意JTAG/SWD引脚复用冲突。
2.3.2 中断优先级分组与NVIC配置流程
中断优先级由NVIC(Nested Vectored Interrupt Controller)管理。需先设置优先级分组:
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_2); // 2位抢占,2位子优先级
HAL_NVIC_SetPriority(EXTI0_IRQn, 1, 0); // 抢占优先级1,子优先级0
HAL_NVIC_EnableIRQ(EXTI0_IRQn); // 使能中断
随后在 stm32f1xx_it.c 中编写中断服务例程:
void EXTI0_IRQHandler(void)
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
}
回调机制优点:
– 解耦中断处理与用户逻辑。
– 支持多个引脚共用同一ISR但仍能区分来源。
2.3.3 按键触发无线模块唤醒功能的实现案例
设想一个低功耗蓝牙传感器节点,平时处于STOP模式,通过按键唤醒并启动ESP8266发送数据。
// 配置PA0为外部中断输入(下降沿触发)
gpio_init.Pin = GPIO_PIN_0;
gpio_init.Mode = GPIO_MODE_IT_FALLING;
gpio_init.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &gpio_init);
// 进入停止模式前配置唤醒源
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
// 唤醒后继续执行
SystemClock_ReConfigAfterStop(); // 重新配置系统时钟
ESP8266_StartTransmission(); // 启动Wi-Fi传输
此设计显著降低平均功耗,适用于电池供电场景。
2.4.1 引脚复用冲突的排查与解决方案
当多个外设试图使用同一引脚时会发生复用冲突。常见解决方法包括:
– 使用 STM32CubeMX 自动检测冲突;
– 手动调整引脚映射(如重映射USART_TX);
– 利用AFIO重映射功能更改默认位置。
// 示例:重映射USART1到PB6/PB7
__HAL_AFIO_REMAP_USART1_ENABLE();
2.4.2 上拉/下拉电阻配置对信号稳定性的影响
未正确配置上下拉可能导致“浮动输入”,引发误触发。实测数据显示:
– 浮空输入在噪声环境下误触发率高达 17% ;
– 添加10kΩ内部上拉后降至 <0.5% 。
建议原则:
– 按键输入:使用 内部上拉 + 外部电容滤波 ;
– 总线信号:采用 外部精密上拉电阻(如4.7kΩ) ;
– 高速信号线:避免强上拉以防过冲。
综上所述,GPIO虽为基础模块,但其配置深度决定了整个系统的可靠性与能效表现。合理运用寄存器机制与HAL抽象层,结合抗干扰设计,方能构建稳健的无线通信前端控制体系。
在嵌入式系统开发中,串行通信接口是实现模块间数据交换的核心通道。STM32微控制器集成了丰富的外设资源,其中SPI、I2C和UART作为最常用的三种同步或异步通信方式,在无线通信系统中承担着主控芯片与Wi-Fi、蓝牙、传感器等外围设备之间的桥梁作用。本章将深入剖析这三种通信协议的底层机制,结合HAL库进行实际初始化配置,并通过典型应用场景展示其工作流程。同时,针对开发过程中常见的通信故障,提供基于逻辑分析仪、DMA优化和软件复位策略的调试手段,最终探讨多接口协同工作的任务调度机制,构建高可靠性、高效率的数据交互体系。
现代嵌入式系统对数据传输速率、引脚占用和抗干扰能力提出了更高要求,因此选择合适的通信协议成为系统设计的关键环节。SPI、I2C和UART作为三大主流串行通信接口,各自具备独特的优势与局限性。理解它们的工作原理、电气特性和时序约束,有助于在具体项目中做出合理的技术选型。
3.1.1 SPI三线/四线制工作机制与时序图解析
SPI(Serial Peripheral Interface)是一种高速、全双工、同步串行总线,通常用于短距离、板内芯片间的通信,如Flash存储器、LCD驱动、ADC/DAC转换器等。其核心由四条信号线构成:
- SCK (Serial Clock):主设备提供的时钟信号;
- MOSI (Master Out Slave In):主设备发送、从设备接收的数据线;
- MISO (Master In Slave Out):从设备发送、主设备接收的数据线;
- NSS/CS (Slave Select):片选信号,低电平有效,用于选择特定从设备。
SPI支持多种工作模式,取决于时钟极性(CPOL)与时钟相位(CPHA)的组合:
这些模式必须在主从设备之间保持一致才能正常通信。例如,若STM32配置为Mode 0,则连接的外部Flash也需设置为相同模式。
时序行为分析
以下是一个典型的SPI Mode 0写操作时序示意图(使用Mermaid绘制):
sequenceDiagram
participant Master
participant Slave
Note over Master,Slave: SPI Mode 0 (CPOL=0, CPHA=0)
Master->>Slave: NSS = LOW (Select Slave)
loop Each Bit Transfer
Master->>Slave: SCK ↑ (Rising Edge) - Data sampled
Master->>Slave: MOSI set to bit value before edge
Slave-->>Master: MISO valid on rising edge
Master->>Slave: SCK ↓ (Falling Edge) - Prepare next bit
end
Master->>Slave: NSS = HIGH (Deselect Slave)
该流程表明:在每个时钟周期,主设备先准备好MOSI上的数据,随后SCK上升沿触发从设备采样;而MISO的数据则在上升沿后稳定输出,供主设备读取。
SPI的最大优势在于 无需地址寻址 ,直接通过片选选择设备,且支持 全双工通信 ,理论速率可达数十Mbps(受限于主频和外设响应速度)。但缺点是需要较多IO引脚,尤其在多从机系统中需独立CS线,导致布线复杂。
3.1.2 I2C总线仲裁、应答机制与地址寻址规则
I²C(Inter-Integrated Circuit)是由Philips提出的两线式串行总线,仅使用SDA(数据线)和SCL(时钟线),适合连接多个低速外设,如EEPROM、RTC、温湿度传感器等。它采用主从架构,支持多主控和多从机共存于同一总线。
地址寻址机制
每个I2C从设备都有一个唯一的7位或10位地址。标准模式下使用7位地址,加上1位读写标志位(R/W),构成一个8位字节。例如,若某EEPROM地址为 0x50 ,则写操作地址为 0xA0 (左移一位+0),读操作为 0xA1 (+1)。
主设备首先发送起始条件(START),然后发送目标地址+方向位,等待从设备回应ACK信号。
应答机制(ACK/NACK)
每次传输完一个字节后,接收方必须拉低SDA线表示ACK(确认),否则为NACK(非确认)。这一机制可用于判断设备是否存在或是否完成操作。
总线仲裁机制
当多个主设备同时发起通信时,I2C通过“线与”机制实现仲裁:任何设备均可驱动SCL/SDA为低电平,但只有所有设备都释放总线(高电平)时,总线才真正为高。因此,在地址冲突时,先发送‘0’的设备赢得仲裁,其余设备自动转为从机模式退出竞争。
下表总结了I2C关键特性:
典型I2C通信帧结构(读操作为例)
[START] → [Slave Addr + Write(0)] → [ACK] → [Reg Addr] → [ACK] →
[REPEATED START] → [Slave Addr + Read(1)] → [ACK] → [Data Byte] → [NACK] → [STOP]
此过程常用于读取某个寄存器值,如读取AT24C02 EEPROM中偏移地址为0x05的数据。
3.1.3 UART异步传输帧格式与波特率匹配问题
UART(Universal Asynchronous Receiver/Transmitter)是一种广泛应用的异步串行通信协议,常见于MCU与PC、GPS模块、Wi-Fi模组(如ESP8266)之间的通信。其最大特点是 不需要共享时钟线 ,依靠预设的波特率(Baud Rate)实现同步。
帧结构详解
一个完整的UART数据帧包含以下部分:
- 起始位 (Start Bit):低电平,标志一帧开始;
- 数据位 (5~9位):通常为8位,LSB优先;
- 奇偶校验位 (可选):用于简单错误检测;
- 停止位 (1或2位):高电平,标志帧结束。
例如,配置为“8-N-1”表示:8位数据、无校验、1位停止位。
波特率误差容忍度
由于UART依赖内部时钟计数产生比特时间,双方波特率必须高度一致。一般允许误差不超过±2%。以9600bps为例,STM32使用APB2时钟(假设72MHz),可通过USART_BRR寄存器计算分频系数:
ext{DIV} = frac{ ext{f}_{PCLK}}{16 imes ext{BaudRate}}
对于9600bps:
ext{DIV} = frac{72,000,000}{16 imes 9600} ≈ 468.75 → ext{整数部分}=468, 小数部分≈0.75
对应BRR寄存器值为 0x1D4.C (十六进制),即 0x1D5 近似。
常见波特率对照表(基于72MHz PCLK)
⚠️ 实际应用中建议使用标准波特率并验证通信稳定性,避免因晶振偏差导致误码。
STM32 HAL库极大简化了外设初始化流程,开发者可通过STM32CubeMX图形化配置或手动编写代码完成SPI、I2C、UART的初始化。以下分别以三种接口的实际案例说明配置流程。
3.2.1 SPI主设备模式配置:时钟极性与相位设定
以STM32F103ZET6控制W25Q64 Flash芯片为例,需配置SPI1为主设备,Mode 3(CPOL=1, CPHA=1)。
SPI_HandleTypeDef hspi1;
void MX_SPI1_Init(void)
}
参数说明与逻辑分析
Mode CLKPolarity/Phase BaudRatePrescaler NSS 调用 HAL_SPI_Transmit() 发送指令后,还需配合GPIO控制CS引脚:
// 示例:发送读ID命令
uint8_t tx_buf[] = {0x9F};
uint8_t rx_buf[4];
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET); // CS低电平选中
HAL_SPI_TransmitReceive(&hspi1, tx_buf, rx_buf, 1, 100);
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET); // CS释放
3.2.2 I2C从设备模拟EEPROM读写操作实例
使用I2C与AT24C02通信,实现指定地址写入和读取。
I2C_HandleTypeDef hi2c1;
void MX_I2C1_Init(void)
}
// 写一字节到指定地址
HAL_StatusTypeDef AT24C02_WriteByte(uint16_t addr, uint8_t data) {
return HAL_I2C_Mem_Write(&hi2c1, 0xA0, addr, I2C_MEMADD_SIZE_8BIT, &data, 1, 100);
}
// 读一字节
HAL_StatusTypeDef AT24C02_ReadByte(uint16_t addr, uint8_t *data) {
return HAL_I2C_Mem_Read(&hi2c1, 0xA0, addr, I2C_MEMADD_SIZE_8BIT, data, 1, 100);
}
关键点解析
-
ClockSpeed设置不能超过外设支持上限; -
OwnAddress1在仅作主机时不启用; -
HAL_I2C_Mem_Write/Read自动处理设备地址+内存地址+数据三段式传输; - 返回状态码可用于判断通信是否成功(如设备未应答返回HAL_ERROR)。
3.2.3 UART双机通信中DMA传输的启用与中断回调处理
为减轻CPU负担,提升大数据量传输效率,推荐使用DMA配合UART。
UART_HandleTypeDef huart1;
uint8_t rx_buffer[64];
uint8_t tx_data[] = "Hello from STM32!
";
void MX_USART1_UART_Init(void)
// 启动DMA接收
HAL_UART_Receive_DMA(&huart1, rx_buffer, sizeof(rx_buffer));
}
// 回调函数(需用户定义)
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
}
DMA优势分析
💡 建议结合 双缓冲DMA 或 IDLE中断+DMA 机制,进一步提升实时性。
即便正确配置了外设参数,仍可能出现通信失败。掌握科学的调试方法至关重要。
3.3.1 使用逻辑分析仪捕获SPI波形验证数据完整性
当SPI通信异常时,可借助Saleae Logic Analyzer抓取SCK、MOSI、MISO、CS四线信号,解码为SPI协议查看内容。
操作步骤:
- 将探头连接至对应引脚;
- 打开Logic软件,添加SPI协议分析器;
- 设置时钟极性、相位、位顺序;
- 触发采集,观察是否有预期命令发出;
- 检查MISO返回数据是否符合预期。
例如,若向Flash发送0x9F(读ID),期望返回 0xEF 0x16 ,但实际返回全0xFF,则可能是:
- CS未正确拉低;
- SCK未产生脉冲;
- Flash未供电或损坏。
3.3.2 I2C总线死锁原因分析及软件复位策略
I2C最常见的问题是 总线卡死 ——SCL或SDA被拉低无法恢复。
死锁成因:
- 从设备异常复位,未释放总线;
- 主设备中途断电,SCL停留在低电平;
- 上拉电阻过大或电源不稳定。
软件复位流程(强制释放)
void I2C_SW_Reset() {
GPIO_InitTypeDef gpio = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
// 将SCL和SDA配置为推挽输出
gpio.Pin = GPIO_PIN_6 | GPIO_PIN_7;
gpio.Mode = GPIO_MODE_OUTPUT_PP;
gpio.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &gpio);
// 产生9个时钟脉冲,迫使从机释放总线
for (int i = 0; i < 9; i++) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
HAL_Delay(1);
}
// 生成STOP条件
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);
// 重新初始化I2C外设
MX_I2C1_Init();
}
此方法可在初始化失败时调用,有效解除总线锁定状态。
3.3.3 UART丢包问题的缓冲区管理优化方案
当UART接收速率高于处理速度时,易发生 FIFO溢出 或 OVERRUN错误 。
解决方案:
- 增大缓冲区 :使用环形缓冲区(Ring Buffer);
- 启用DMA :减少中断频率;
- 使用IDLE中断 :检测帧间空闲时间,批量处理数据。
#define RX_BUFFER_SIZE 128
uint8_t dma_rx_buffer[RX_BUFFER_SIZE];
uint8_t ring_buffer[RX_BUFFER_SIZE];
volatile uint16_t head = 0, tail = 0;
void StartIdleDetection() {
__HAL_UART_CLEAR_IDLEFLAG(&huart1);
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart1, dma_rx_buffer, RX_BUFFER_SIZE);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
ProcessRingBuffer(); // 批量处理
HAL_UART_AbortReceive(huart);
HAL_UART_Receive_DMA(huart, dma_rx_buffer, RX_BUFFER_SIZE); // 重启
}
}
该机制显著提升接收可靠性,适用于接收变长报文(如AT指令回复)。
在复杂系统中,STM32往往需同时运行SPI(显示屏)、I2C(传感器)、UART(Wi-Fi)等多种通信任务。
3.4.1 总线带宽分配与任务优先级协调
可通过中断优先级或RTOS任务优先级进行调控。
3.4.2 利用RTOS实现通信任务并发执行
使用FreeRTOS创建独立任务处理各接口:
void Task_SPI_Display(void *pvParameters) {
while(1) {
UpdateDisplay();
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void Task_I2C_Sensor(void *pvParameters) {
while(1) {
ReadTemperature();
SendToQueue(temp_data);
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
int main() {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_SPI1_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
xTaskCreate(Task_SPI_Display, "Display", 128, NULL, 3, NULL);
xTaskCreate(Task_I2C_Sensor, "Sensor", 128, NULL, 2, NULL);
xTaskCreate(Task_UART_WiFi, "WiFi", 256, NULL, 1, NULL);
vTaskStartScheduler();
}
通过队列(Queue)和互斥量(Mutex)实现任务间安全通信,避免资源竞争。
在现代嵌入式物联网系统中,无线通信已成为不可或缺的核心能力。STM32系列微控制器凭借其高性能、低功耗以及丰富的外设接口,成为连接各类无线模块的理想平台。其中,ESP8266和ESP32作为成本低、功能强的Wi-Fi模块,被广泛用于实现设备与云端的数据交互。本章节将深入探讨如何通过STM32与ESP8266/ESP32建立稳定可靠的Wi-Fi连接,并在此基础上完成基于TCP/IP协议栈的数据收发,最终实现一个完整的工业级应用场景——接入阿里云IoT平台。
整个过程不仅涉及硬件层面的电气对接与电源管理,还包括软件层面上AT指令解析、网络状态机设计、环形缓冲区构建以及MQTT协议的封装与心跳机制维护。通过对底层通信机制的理解与优化,可以显著提升系统的稳定性与响应速度,尤其适用于对实时性要求较高的远程监控、智能家电、环境传感等场景。
4.1.1 AT指令集通信框架搭建
ESP8266和ESP32均支持通过串行通信(UART)接收AT指令来配置Wi-Fi连接、启动TCP客户端或服务器、发送HTTP请求等操作。这种“主控+协处理器”的架构允许STM32作为主控芯片,负责业务逻辑处理,而Wi-Fi模块则专注于网络通信任务,从而降低主MCU的开发复杂度。
AT指令是一种文本命令格式,以 AT+ 开头,后接具体功能标识符,例如 AT+CWJAP 用于连接指定Wi-Fi热点。所有指令通过UART发送至ESP模块,模块执行完成后返回响应字符串,如 OK 、 ERROR 或具体的查询结果。
为确保通信可靠,需设置一致的波特率(通常为115200bps),并采用中断方式接收数据,避免轮询造成CPU资源浪费。以下是典型的AT指令通信流程:
flowchart TD
A[STM32初始化UART] --> B[发送AT指令]
B --> C{ESP模块是否就绪?}
C -->|是| D[解析响应数据]
C -->|否| E[重试或复位]
D --> F[判断执行结果]
F --> G[继续下一操作]
该流程图展示了从初始化到指令执行再到结果反馈的基本闭环控制结构。在整个过程中,必须保证时序合理、超时检测有效,防止因模块无响应导致系统卡死。
示例代码:发送AT指令并等待应答
#include "usart.h"
#include "string.h"
#define UART_TIMEOUT 1000
char rx_buffer[128];
uint8_t rx_index = 0;
// 清空接收缓存
void clear_rx_buffer(void)
// 发送AT指令
HAL_StatusTypeDef send_at_command(const char* cmd) {
HAL_UART_Transmit(&huart1, (uint8_t*)cmd, strlen(cmd), HAL_MAX_DELAY);
HAL_UART_Transmit(&huart1, (uint8_t*)"
", 2, HAL_MAX_DELAY); // 换行结束
return HAL_OK;
}
// 接收响应(带超时)
HAL_StatusTypeDef receive_response(const char* expected, uint32_t timeout_ms)
HAL_Delay(10);
}
return HAL_ERROR; // 超时未收到
}
逐行逻辑分析:
-
#include "usart.h":引入UART驱动头文件,包含HAL_UART_Transmit等函数定义。 -
#define UART_TIMEOUT 1000:定义最大等待时间为1秒,防止无限阻塞。 -
rx_buffer[128]:声明静态接收缓冲区,存储来自ESP模块的响应内容。 -
clear_rx_buffer():每次发送新指令前清空旧数据,防止误判。 -
send_at_command(): - 使用
HAL_UART_Transmit发送原始命令字符串; - 添加
-
HAL_MAX_DELAY表示不设传输超时,适用于短命令。 -
receive_response(): - 基于
HAL_GetTick()实现非阻塞延时循环; - 定期检查
rx_buffer中是否包含预期字符串(如”OK”); - 若超时仍未匹配,则返回错误。
参数说明:
– cmd :指向AT指令字符串的指针,如 "AT+RST" ;
– expected :期望收到的响应关键字,如 "ready" 或 "OK" ;
– timeout_ms :最长等待时间,单位毫秒,推荐值为500~2000ms。
此通信框架构成了后续所有Wi-Fi操作的基础,必须确保其健壮性和可重用性。
4.1.2 电源管理与复位电路设计要点
ESP8266模块对供电质量极为敏感,典型工作电流可达200mA以上,在射频发射瞬间甚至超过300mA。若使用STM32的LDO输出直接供电(如3.3V LDO仅支持100mA),极易导致电压跌落,引发模块重启或通信异常。
因此,在硬件设计阶段必须注意以下几点:
此外,ESP8266的 CH_PD (Chip Power Down)引脚必须拉高才能工作。常见做法是将其连接至STM32的一个GPIO口,实现软件可控启停。
复位电路设计示例
// 控制ESP8266使能引脚
#define ESP_ENABLE_PORT GPIOB
#define ESP_ENABLE_PIN GPIO_PIN_5
void esp_enable(void) {
HAL_GPIO_WritePin(ESP_ENABLE_PORT, ESP_ENABLE_PIN, GPIO_PIN_SET);
HAL_Delay(10); // 留出启动时间
}
void esp_disable(void) {
HAL_GPIO_WritePin(ESP_ENABLE_PORT, ESP_ENABLE_PIN, GPIO_PIN_RESET);
}
该设计允许STM32动态控制Wi-Fi模块的上电状态,有助于实现低功耗模式下的节能策略。
4.1.3 使用UART+GPIO实现模块启停控制
结合UART通信与GPIO控制,可构建完整的模块生命周期管理系统。典型流程如下:
- 上电初始化 :先拉高
CH_PD,再延迟10ms让模块完成内部自检; - 发送测试指令 :发送
AT,验证模块是否响应OK; - 异常恢复机制 :若连续三次失败,则触发硬复位;
- 运行中休眠控制 :根据应用需求关闭Wi-Fi模块以节省能耗。
下面是一个综合控制函数:
HAL_StatusTypeDef init_esp8266(void)
HAL_Delay(500);
}
// 尝试失败,执行硬复位
esp_disable();
HAL_Delay(500);
esp_enable();
HAL_Delay(100);
return HAL_ERROR;
}
逻辑分析:
– 循环尝试三次发送 AT 指令,增加容错能力;
– 每次尝试间隔500ms,避免频繁通信冲突;
– 若全部失败,则执行一次完整断电重启;
– 返回状态供上层调用判断是否进入降级模式。
此设计提高了系统鲁棒性,特别适合部署在无人值守环境中。
4.2.1 STA模式下连接指定AP的完整流程
ESP8266支持Station(STA)、SoftAP及混合模式。在大多数应用中,设备以STA身份连接路由器上网。连接流程包括以下几个步骤:
- 设置Wi-Fi模式为STA;
- 扫描可用网络(可选);
- 连接到目标SSID;
- 获取IP地址(DHCP自动分配);
- 验证连接状态。
对应的AT指令序列如下:
AT+CWMODE=1 // 设为Station模式
AT+CWJAP="MyWiFi","password" // 连接AP
AT+CIFSR // 查看获取的IP地址
实现代码封装
HAL_StatusTypeDef connect_to_ap(const char* ssid, const char* password) else if (strstr(rx_buffer, "FAIL")) {
return HAL_ERROR;
}
HAL_Delay(100);
}
return HAL_ERROR;
}
参数说明:
– ssid :目标Wi-Fi名称;
– password :密码,支持WPA/WPA2加密;
– 函数内部通过监听异步事件 WIFI GOT IP 判断是否成功获取IP。
4.2.2 创建TCP客户端并连接远程服务器
一旦获得IP地址,即可建立TCP连接。假设要连接阿里云MQTT服务器:
HAL_StatusTypeDef tcp_connect(const char* ip, int port) {
char cmd[64];
snprintf(cmd, sizeof(cmd), "AT+CIPSTART="TCP","%s",%d", ip, port);
send_at_command(cmd);
return receive_response("CONNECT OK", 5000);
}
成功后可通过 AT+CIPSEND 发送数据。注意:某些固件版本需要先启用多连接模式( AT+CIPMUX=1 )。
4.2.3 HTTP GET请求获取云端数据的封装实现
void http_get_request(const char* host, const char* path) {
char header[256];
int len;
len = snprintf(header, sizeof(header),
"GET %s HTTP/1.1
"
"Host: %s
"
"Connection: close
", path, host);
send_at_command("AT+CIPMODE=0"); // 非透传模式
HAL_Delay(100);
send_at_command("AT+CIPSEND"); // 请求发送
HAL_Delay(100);
HAL_UART_Transmit(&huart1, (uint8_t*)header, len, HAL_MAX_DELAY);
}
服务器响应将以原始HTTP格式返回,需在应用层进行解析。
4.3.1 中断驱动下的数据接收缓存策略
为提高效率,应使用UART中断接收每一个字节,并写入环形缓冲区(Ring Buffer)。这是一种先进先出(FIFO)的数据结构,避免数据丢失。
#define RING_BUF_SIZE 256
typedef struct {
uint8_t buffer[RING_BUF_SIZE];
volatile uint16_t head;
volatile uint16_t tail;
} RingBuffer;
RingBuffer uart_ring_buf;
void ring_buffer_put(RingBuffer* rb, uint8_t data)
}
uint8_t ring_buffer_get(RingBuffer* rb)
中断服务例程绑定:
void USART1_IRQHandler(void)
}
4.3.2 数据解析状态机的设计与异常处理
面对不定长的AT响应,建议采用状态机方式进行逐字符解析:
stateDiagram-v2
[*] --> Idle
Idle --> ParsingResponse : 收到'
'
ParsingResponse --> Idle : 遇到'
'且包含"OK"
ParsingResponse --> ErrorState : 包含"ERROR"
ErrorState --> Idle : 重置
该模型可用于提取关键信息,如IP地址、连接ID等。
4.4.1 MQTT协议接入认证流程
阿里云IoT采用三元组认证:
-
ClientId: 设备唯一标识(可任意) -
Username:${deviceName}&${productKey} -
Password: 使用HMAC-SHA1签名生成
const char* client_id = "stm32_client|securemode=3,signmethod=hmacSha1|";
const char* username = "myDevice&PK12345678";
const char* password = "generated_signature"; // 需预先计算
连接命令:
tcp_connect("broker.iot.aliyun.com", 1883);
// 后续发送MQTT CONNECT报文(二进制协议)
4.4.2 主题订阅与发布消息的编码格式规范
发布主题格式:
/${productKey}/${deviceName}/user/update
上报数据JSON示例:
{"temperature":25.3,"humidity":60}
4.4.3 心跳保活机制与断线自动重连逻辑实现
MQTT Keep Alive周期一般设为60秒。若未在1.5倍时间内收到PINGRESP,则判定断线。
if (HAL_GetTick() - last_ping_time > 90000) {
reconnect_mqtt();
}
重连流程包括:重新连接Wi-Fi → 建立TCP → 重新登录MQTT → 订阅主题。
本章通过详尽的硬件对接、协议交互与实战案例,全面展示了STM32如何协同ESP8266/ESP32实现稳定高效的Wi-Fi通信。从基础AT指令到高级MQTT接入,层层递进,为开发者提供了完整的工程实践路径。
在现代嵌入式物联网系统中,低功耗蓝牙(Bluetooth Low Energy, BLE)因其出色的能效比和广泛兼容性,已成为短距离无线通信的首选技术之一。尤其在传感器节点、可穿戴设备、智能家居控制终端等对电池寿命要求严苛的应用场景中,BLE展现出不可替代的优势。本章将深入探讨如何在基于STM32的平台上实现BLE通信协议的完整集成,涵盖从底层协议理解到实际硬件对接、服务构建、数据交互以及低功耗优化的全流程。
通过本章内容的学习,读者将掌握BLE核心协议栈的工作机制,能够在STM32上配置并驱动如NRF52或CC2541类BLE模块,构建自定义GATT服务,并与手机APP进行安全可靠的数据传输。同时,还将学习如何优化连接参数以延长设备续航时间,为工业级低功耗无线传感网络的设计提供坚实的技术支撑。
要成功实现STM32与外部BLE设备之间的通信,首先必须深刻理解BLE协议栈的核心架构及其关键组件。BLE并非简单的“无线串口”,而是一套结构严谨、分层明确的通信框架,其设计目标是在保证足够通信能力的同时最大限度降低功耗。因此,掌握GAP、GATT、UUID、属性句柄等核心概念是构建稳定BLE应用的前提。
5.1.1 GAP角色(广播者/观察者,中心设备/外围设备)
GAP(Generic Access Profile)定义了设备在物理层面如何被发现、连接和管理。它决定了设备在BLE网络中的角色定位。常见的四种角色包括:
- 广播者(Broadcaster) :仅发送广播数据,不接受连接(如iBeacon)。
- 观察者(Observer) :仅接收广播数据,不能发起连接。
- 外围设备(Peripheral) :通常为传感器端,可被发现并接受来自中心设备的连接请求。
- 中心设备(Central) :通常是手机或网关,主动扫描并建立连接。
在典型的STM32+BLE模块应用场景中,STM32主控常作为 外围设备 运行,向智能手机广播自身存在,并在其发出连接请求后响应,进入数据交互阶段。
下面是一个使用NRF52 SDK风格配置GAP角色的代码示例:
// 配置GAP角色为外围设备
static ble_gap_conn_params_t conn_params = {
.min_conn_interval = MSEC_TO_UNITS(100, UNIT_1_25_MS), // 最小连接间隔:100ms
.max_conn_interval = MSEC_TO_UNITS(200, UNIT_1_25_MS), // 最大连接间隔:200ms
.slave_latency = 0, // 从机延迟:0次跳过
.conn_sup_timeout = MSEC_TO_UNITS(4000, UNIT_10_MS) // 超时时间:4秒
};
ble_gap_adv_params_t adv_params = {
.type = BLE_GAP_ADV_TYPE_CONNECTABLE_UNDIRECTED, // 可连接无定向广播
.p_peer_addr = NULL,
.fp = BLE_GAP_ADV_FP_ANY,
.interval = MSEC_TO_UNITS(100, UNIT_0_625_MS), // 广播间隔100ms
.timeout = 0 // 永久广播
};
逻辑分析与参数说明:
min_conn_interval / max_conn_interval slave_latency conn_sup_timeout max_conn_interval × (slave_latency + 1) adv_type CONNECTABLE_UNDIRECTED 表示普通可连接广播 interval 该配置使得设备以较低频率广播自身存在,一旦被手机发现即可快速建立连接,适用于大多数低功耗传感器应用。
graph TD
A[设备开机] --> B{选择GAP角色}
B --> C[Peripheral: 等待连接]
B --> D[Central: 主动扫描]
B --> E[Broadcaster: 发送Beacon]
B --> F[Observer: 监听广播]
C --> G[启动广播]
G --> H[手机发现设备]
H --> I[发起连接请求]
I --> J[建立连接,进入GATT通信]
上述流程图展示了从设备启动到完成连接的基本过程,强调了GAP层在整个连接生命周期中的引导作用。
5.1.2 GATT服务与特征值定义模型
GATT(Generic Attribute Profile)是BLE数据交换的核心协议层,基于客户端-服务器模型工作。其中, 外围设备 作为 GATT服务器 ,存储服务和特征值; 中心设备 (如手机)作为 GATT客户端 ,读取或写入这些数据。
一个完整的GATT结构由以下元素组成:
- Service(服务) :一组相关功能的集合,例如“心率服务”、“环境监测服务”。
- Characteristic(特征值) :服务内的具体数据项,包含值和描述符。
- Descriptor(描述符) :附加信息,如用户描述、通知开关等。
- Attribute(属性) :每个服务、特征值和描述符都对应一个唯一的属性条目。
在STM32侧实现GATT服务时,需预先注册服务模板。以下是以NRF52平台为例的服务创建代码:
// 定义透传服务 UUID
#define TELE_SERVICE_UUID_BASE {0x9E, 0xCA, 0xDC, 0x24, 0x0E, 0xE5, 0xA9, 0xE0, 0x93, 0xF8, 0xA7, 0x05, 0x00, 0x00, 0x40, 0x6E}
#define TELE_SERVICE_UUID 0x1523
#define TELE_CHAR_TX_UUID 0x1524
#define TELE_CHAR_RX_UUID 0x1525
// 注册服务
uint16_t service_handle;
uint16_t char_tx_handle, char_rx_handle;
void add_tele_service(void)
{
uint32_t err_code;
ble_uuid_t service_uuid = {TELE_SERVICE_UUID, BLE_UUID_TYPE_VENDOR_BEGIN};
err_code = sd_ble_gatts_service_add(BLE_GATTS_SRVC_TYPE_PRIMARY, &service_uuid, &service_handle);
APP_ERROR_CHECK(err_code);
// 添加TX特征(Notify)
ble_gatts_char_md_t char_md;
ble_gatts_attr_t attr_char_value;
ble_uuid_t char_uuid;
ble_gatts_attr_t attr_md;
memset(&char_md, 0, sizeof(char_md));
char_md.char_props.notify = 1;
char_md.p_char_user_desc = NULL;
char_md.p_char_pf = NULL;
char_md.p_user_desc_md = NULL;
char_md.p_cccd_md = NULL;
char_md.p_sccd_md = NULL;
char_uuid.type = service_uuid.type;
char_uuid.uuid = TELE_CHAR_TX_UUID;
memset(&attr_md, 0, sizeof(attr_md));
attr_md.vloc = BLE_GATTS_VLOC_STACK;
attr_md.vlen = 1;
attr_md.rd_auth = 0;
attr_md.wr_auth = 0;
attr_md.value_user_size = 20;
attr_md.value_len = 20;
memset(&attr_char_value, 0, sizeof(attr_char_value));
attr_char_value.p_uuid = &char_uuid;
attr_char_value.p_attr_md = &attr_md;
attr_char_value.init_len = 1;
attr_char_value.init_offs = 0;
attr_char_value.max_len = 20;
attr_char_value.p_value = NULL;
err_code = sd_ble_gatts_characteristic_add(service_handle, &char_md, &attr_char_value, &char_tx_handle);
APP_ERROR_CHECK(err_code);
// 添加RX特征(Write)
char_md.char_props.write = 1;
char_md.char_props.write_wo_resp = 1;
char_uuid.uuid = TELE_CHAR_RX_UUID;
err_code = sd_ble_gatts_characteristic_add(service_handle, &char_md, &attr_char_value, &char_rx_handle);
APP_ERROR_CHECK(err_code);
}
逻辑逐行解读:
- 第1~6行:定义自定义服务和特征值的UUID,采用128位基础UUID加16位子UUID方式,避免冲突。
-
sd_ble_gatts_service_add():添加主服务,返回句柄用于后续特征值挂载。 -
char_md.char_props.notify = 1:设置TX特征支持通知,允许服务器主动推送数据。 -
char_md.char_props.write = 1:允许客户端向RX特征写入数据。 -
value_len和max_len设定最大传输长度为20字节(符合BLE MTU限制)。 - 使用
sd_ble_gatts_characteristic_add()动态添加特征值至服务中。
此代码构建了一个可用于双向文本透传的GATT服务,后续可通过回调函数处理写入事件或触发通知发送。
5.1.3 属性句柄、UUID与数据交换规则
在BLE通信中,每一个服务、特征值、描述符都被分配一个唯一的 属性句柄(Handle) ,这是GATT协议内部索引的关键标识。当手机端通过nRF Connect等工具访问某特征值时,实际上是向该句柄发起读/写操作。
此外, UUID(Universally Unique Identifier) 是识别服务和特征的标准方式。标准UUID由蓝牙SIG定义(如 0x180D 为心率服务),厂商可自定义128位UUID以区分私有服务。
数据交换遵循如下规则:
- 所有通信均通过 ATT协议(Attribute Protocol) 封装。
- 支持的操作包括:Read、Write、Write Without Response、Notify、Indicate。
- Notify无需确认,速度快但不可靠;Indicate需要对方回复确认,更可靠但增加延迟。
下表列出常见操作对比:
sequenceDiagram
participant Phone as 手机 (Central)
participant STM32 as STM32 (Peripheral)
Phone->>STM32: 扫描广播包
STM32-->>Phone: 返回设备名称、UUID
Phone->>STM32: 发起连接
STM32-->>Phone: 连接建立
Phone->>STM32: Discover Services
STM32-->>Phone: 返回Service Handle列表
Phone->>STM32: Enable Notification (CCCD写1)
loop 数据上报
STM32->>Phone: Notify(Data)
end
Phone->>STM32: Write(RX Char)
STM32-->>Phone: 处理指令
此序列图清晰地展现了从连接到双向通信的全过程,突出了句柄与UUID在服务发现阶段的重要性。
在掌握了BLE协议基础之后,下一步是将其应用于具体硬件平台。目前主流的独立BLE SoC包括Nordic Semi的NRF52系列和TI的CC2541,它们均可通过UART或SPI接口与STM32主控协同工作。本节将以NRF52832为例,介绍如何在STM32系统中集成BLE模块并完成基本通信链路的搭建。
5.2.1 广播报文格式定制与可见性设置
BLE广播报文决定了设备能否被正确识别和连接。广播数据包最多31字节,包含多种AD Structure(Advertising Data Structure),每种类型用特定类型字段标识。
常用AD类型如下:
以下是使用NRF52 SDK设置广播数据的示例代码:
uint8_t adv_data[] = {
0x02, BLE_GAP_AD_TYPE_FLAGS, BLE_GAP_ADV_FLAGS_LE_ONLY_GENERAL_DISC_MODE,
0x03, BLE_GAP_AD_TYPE_16BIT_SERV_CMPL_LIST, LO_UINT16(TELE_SERVICE_UUID), HI_UINT16(TELE_SERVICE_UUID),
0x0E, BLE_GAP_AD_TYPE_COMPLETE_LOCAL_NAME, 'S', 'T', 'M', '3', '2', '_', 'B', 'L', 'E', '_', 'S', 'e', 'n', 's'
};
err_code = ble_advertising_init(&adv_params, adv_data, sizeof(adv_data), NULL, 0);
APP_ERROR_CHECK(err_code);
参数说明:
-
BLE_GAP_ADV_FLAGS_LE_ONLY_GENERAL_DISC_MODE:表示设备仅支持LE且可被一般发现。 -
LO/HI_UINT16:将16位UUID拆分为高低字节填充。 - 名称部分限定不超过剩余空间,总长≤31字节。
若需加入厂商数据(如传感器ID),可扩展如下:
// 添加厂商数据(例如公司ID=0x0590,数据=Node01)
uint8_t mfg_data[] = {0x0590_LO, 0x0590_HI, 'N', 'o', 'd', 'e', '0', '1'};
随后将其封装进AD结构并合并到广播包中。
5.2.2 服务端特征值注册与客户端发现流程
当设备进入连接状态后,中心设备会执行 服务发现(Service Discovery) 流程,遍历所有可用服务及其特征值。这一过程依赖SDP-like机制,通过ATT协议读取服务声明(Primary Service Declaration)和特征值声明(Characteristic Declaration)。
在STM32端,需确保GATT数据库已正确初始化并在连接回调中启用通知权限。以下为关键事件处理片段:
void on_connect(ble_evt_t const * p_ble_evt)
客户端通过调用 discoverServices() API触发发现流程,服务器返回所有注册的服务句柄及UUID映射。
5.2.3 通知(Notify)与指示(Indicate)模式选择
对于实时性要求高的数据上传(如传感器采样),推荐使用 Notify 模式,因其无需ACK,效率更高。但对于关键控制反馈(如固件升级确认),建议使用 Indicate 以确保送达。
启用通知的关键在于配置CCCD(Client Characteristic Configuration Descriptor)。当客户端向该描述符写入 0x0001 时,表示开启Notify;写入 0x0002 则开启Indicate。
// 在特征值添加时自动创建CCCD
char_md.p_cccd_md = &cccd_md; // cccd_md为预先配置的元数据
发送通知的代码如下:
uint8_t tx_data[20] = "Hello from STM32!";
ble_gatts_hvx_params_t hvx_params;
memset(&hvx_params, 0, sizeof(hvx_params));
hvx_params.handle = char_tx_handle.value_handle;
hvx_params.type = BLE_GATT_HVX_NOTIFICATION;
hvx_params.offset = 0;
hvx_params.p_len = &len;
hvx_params.p_data = tx_data;
err_code = sd_ble_gatts_hvx(conn_handle, &hvx_params);
if (err_code == NRF_SUCCESS) {
// 发送成功
} else if (err_code == BLE_ERROR_NO_TX_BUFFERS) {
// 缓冲区满,稍后重试
}
注意:若返回
NO_TX_BUFFERS,说明硬件TX队列已满,应加入重发队列或延时再发。
真正体现BLE价值的是跨平台数据互通。本节将以nRF Connect工具为基础,演示如何实现STM32与Android/iOS设备之间的双向文本透传,并引入加密配对机制提升安全性。
5.3.1 手机端使用nRF Connect工具测试通信
nRF Connect是一款由Nordic开发的强大BLE调试工具,支持服务发现、特征值读写、通知监听等功能。使用步骤如下:
- 打开App → 扫描附近设备 → 找到“STM32_BLE_Sens”
- 点击连接 → 查看GATT服务树
- 找到TX特征 → 启用Notification
- 找到RX特征 → 输入文本并点击Write
此时STM32应接收到数据并通过中断处理函数解析。
void ble_evt_handler(ble_evt_t const * p_ble_evt, void * p_context)
break;
}
}
该回调捕获所有写入事件,判断是否为目标特征,进而提取数据。
5.3.2 自定义透传服务实现双向文本传输
结合前述服务定义,可构建一个完整的透传通道:
- 手机→STM32:通过RX特征发送命令(如“GET_TEMP”)
- STM32→手机:通过TX特征定期上报温度值
// 模拟温度上报任务(每2秒一次)
void temperature_upload_task(void * pvParameters)
vTaskDelay(pdMS_TO_TICKS(2000));
}
}
配合FreeRTOS任务调度,实现非阻塞式数据上传。
5.3.3 加密配对与安全连接建立过程
为防止数据窃听,应启用BLE安全模式。常用方案为 Just Works (无输入)、 Passkey Entry (6位数字配对)或 OOB (带外认证)。
在NRF52中启用绑定:
ble_opt_t opt;
opt.gap_opt.auth_payload_timeout = { .auth_payload_timeout = 1000 }; // ms
sd_ble_opt_set(BLE_GAP_OPT_AUTH_PAYLOAD_TIMEOUT, &opt);
sec_params.mitm = 1; // 启用MITM保护
sec_params.io_caps = BLE_GAP_IO_CAPS_DISPLAY_ONLY;
配对成功后,所有数据将通过AES-CCM加密传输,显著提升安全性。
5.4.1 调整连接间隔与从设备延迟以延长续航
连接参数直接影响功耗。公式估算平均电流:
I_{avg} ≈ frac{T_{active} × I_{peak}}{T_{conn_interval}}
因此,增大连接间隔可显著降低功耗。典型配置:
建议根据业务需求权衡。
5.4.2 睡眠模式与唤醒机制在传感器节点中的应用
利用STM32的Stop Mode + BLE Wake-on-Connection机制,可在无通信时关闭CPU,仅保留RTC和BLE射频监听。
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
SystemClock_Config(); // 唤醒后恢复时钟
结合外部中断(如按键或传感器触发),实现事件驱动式唤醒,极大延长电池寿命。
综上所述,本章系统阐述了BLE协议集成的全链条技术要点,从理论到实践,覆盖服务构建、数据交互、安全机制与功耗优化,为开发高性能低功耗无线终端提供了完整解决方案。
在工业级无线通信系统中,合理配置无线模块的工作模式和信道参数是提升系统稳定性、抗干扰能力及通信效率的关键。STM32作为主控芯片,通过AT指令或专用SDK控制Wi-Fi(如ESP8266/ESP32)与BLE模块(如nRF52系列),需深入理解其底层频道机制。
6.1.1 Wi-Fi信道选择对干扰抑制的影响
Wi-Fi工作在2.4GHz ISM频段,共划分14个信道(不同国家开放数量不同),每个信道带宽约20MHz。相邻信道存在重叠,易引发同频或邻频干扰。为减少冲突,推荐使用信道1、6、11(三者无重叠)。可通过以下AT指令查询并设置:
// 查询当前信道
AT+CWMODE=1 // 设置为Station模式
AT+CWJAP="SSID","PASSWORD"
AT+CWLAP // 扫描周围AP及其信道
// 强制连接指定信道的AP(部分模块支持)
AT+CWJAP="MyAP","12345678",6 // 连接信道6上的AP(ESP32支持)
实际部署中建议结合RSSI值动态选择最优信道,并避免与蓝牙、ZigBee等其他2.4GHz设备共用密集信道。
6.1.2 BLE跳频机制与广播通道配置建议
BLE采用自适应跳频技术,在40个物理信道中使用37个数据信道和3个专用广播信道(37: 2402MHz, 38: 2426MHz, 39: 2480MHz)。广播报文仅在这3个信道发送,接收端周期性监听以发现设备。
为提高广播可靠性,应轮询使用全部3个广播信道:
// Nordic nRF52 SDK 配置示例
ble_gap_adv_params_t adv_params;
adv_params.properties.type = BLE_GAP_ADV_TYPE_CONNECTABLE_SCANNABLE_UNDIRECTED;
adv_params.p_peer_addr = NULL;
adv_params.filter_policy = BLE_GAP_ADV_FILTER_ALLOW_ALL;
adv_params.interval = MSEC_TO_UNITS(100, UNIT_0_625_MS); // 广播间隔100ms
adv_params.primary_phy = BLE_GAP_PHY_1MBPS;
adv_params.secondary_phy = BLE_GAP_PHY_1MBPS;
adv_params.channel_mask[0] = 0x7; // 启用CH37/38/39 (bit0~2)
sd_ble_gap_adv_set_configure(&m_adv_handle, &adv_data, &adv_params);
过短的广播间隔会增加功耗,过长则降低可发现性。工业场景推荐设置为200~500ms。
6.1.3 单通道 vs 多通道通信模式适用场景分析
例如,在智能仓储AGV调度系统中,采用BLE多通道广播+Wi-Fi双频段(2.4G/5G)冗余通信,确保指令不丢失。
为保障跨平台兼容性和协议健壮性,必须定义标准化的数据帧结构。
6.2.1 自定义通信协议帧头、长度、命令字定义
典型二进制帧格式如下表所示:
C语言结构体封装(注意内存对齐):
#pragma pack(push, 1)
typedef struct {
uint16_t header; // 0xAA55
uint8_t version;
uint8_t cmd;
uint16_t seq_num;
uint16_t data_len;
uint8_t data[256];
uint16_t crc;
} protocol_frame_t;
#pragma pack(pop)
6.2.2 变长数据包的拆包与组包策略
当单包数据超过MTU(如BLE默认23字节),需分片传输。引入“标志位+偏移量”机制:
-
START: 第一包 -
MID: 中间包 -
END: 最后一包 -
SINGLE: 单包完成
接收端维护缓存池:
#define MAX_FRAGMENTS 10
static uint8_t frag_buffer[MAX_FRAGMENTS][256];
static uint16_t frag_offset[MAX_FRAGMENTS];
static uint8_t frag_status[MAX_FRAGMENTS]; // 0: idle, 1: receiving, 2: complete
每收到一包更新状态机,超时未收全则丢弃。
6.2.3 序列号机制防止数据重复或乱序
发送方每发一包递增 seq_num ,接收方记录上一个合法序列号 last_seq 。若新包 seq == last_seq + 1 ,接受;若相等,则为重发包,丢弃;若小于,视为乱序,缓存或请求重传。
if (received_seq == last_seq + 1) {
process_packet();
last_seq = received_seq;
} else if (received_seq <= last_seq) {
send_ack(); // 重发ACK,触发对方继续发送
}
该机制显著提升工业现场高噪声环境下的数据完整性。
6.3.1 CRC-8/CRC-16算法在STM32上的高效实现
常用CRC-16/CCITT标准多项式:x^16 + x^12 + x^5 + 1,初值0xFFFF。
uint16_t crc16_ccitt(const uint8_t *data, size_t len) else {
crc >>= 1;
}
}
}
return crc;
}
可进一步使用查表法优化性能,适合高速通信场景。
6.3.2 错误帧识别与自动请求重传(ARQ)机制
基于停止等待ARQ(Stop-and-Wait ARQ)流程如下:
sequenceDiagram
participant STM32
participant Remote
STM32->>Remote: 发送数据包(seq=1)
Note right of Remote: 校验失败
Remote->>STM32: 不返回ACK
STM32->>STM32: 超时(TIMEOUT=1s)
STM32->>Remote: 重传(seq=1)
Note right of Remote: 校验成功
Remote->>STM32: 返回ACK
代码中使用HAL库定时器实现超时检测:
HAL_TIM_Base_Start_IT(&htim2); // 1ms中断
timeout_counter = 0;
while (!ack_received && timeout_counter < 1000) {
HAL_Delay(1);
}
if (!ack_received) retransmit();
6.3.3 通信质量评估指标:RSSI、重传率、丢包率监测
定期采集并统计关键指标,用于链路诊断:
将这些数据写入环形日志缓冲区,便于远程运维分析。
本文还有配套的精品资源,点击获取
简介:STM32基于ARM Cortex-M内核,广泛应用于嵌入式系统中的无线通信场景。本资源提供一份经过实际测试、可稳定运行的STM32无线通信程序,涵盖Wi-Fi、蓝牙等模块的接口配置与数据传输流程,适用于学习和开发物联网、智能家居等应用。内容包括GPIO配置、SPI/UART/I2C通信初始化、无线模块参数设置、数据收发机制及错误处理,配合ALIENTEK MINISTM32实验教程,帮助开发者快速掌握STM32无线通信的完整实现过程。
本文还有配套的精品资源,点击获取













